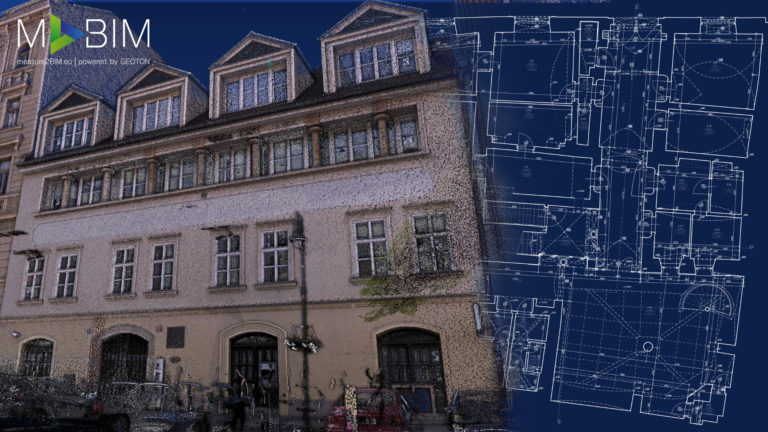
The 3D model in the form of a point cloud is created by the use of a laser scanner, or photogrammetry, and is transmitted immediately after scanning and registration – linking the clouds, or in the case of the use of UAS imaging, after image orientation and cloud processing. Point clouds can routinely be connected in more recent CAD and BIM programs in the same way as reference drawings. The accuracy of the resulting cloud is verified during registration by generating reports from scan transformation data and by the use of checkpoints focused from a very precise total station that has a local network connection. The resulting point cloud can be arbitrarily ‘cropped’ and attenuated to the desired density. The cloud can be georeferenced in the local coordinate system or connected to the S-JTSK coordinate system and the Bpv elevation system.
Applications of pointcloud
Documentation of technologies, facilities or entire buildings
Analysis of current construction
Mapping and deformation analysis of buildings
Data for facility management (CAD, BIM, GIS)
As-Built documentation of buildings (CAD, BIM)
Analysis and digital modelling of terrain
Determination of leaseable areas (BOMA, GIF, RICS, IMPS)
This website uses cookies for analysis purposes. By using our website, we assume that you agree to our use of cookies.
You may revoke your consent for us to store cookies at any time by deleting the cookies. Revoking your consent does not affect the legality of any processing performed on the basis of your consent prior to its revocation.